Information magazine of the Department of Industrial Engineering
Università di Trento

Global Navigation Satellite Systems (GNSS) have transformed our relationship with space: today, we can precisely locate objects, people, and vehicles, paving the way for innovations in logistics, robotics, and personalized services with unprecedented accuracy.
But what happens when satellites can’t “see” us because their signals are blocked by walls and structures?
In indoor environments, where physical obstacles hinder satellite signals, a new player comes into action: Ultra-Wideband (UWB) technology.
Our goal? To make sense of space by designing:
The project developed advanced wearable devices equipped with inertial modules and magnetometers, capable of estimating not only position but also direction and orientation. Designed for complex environments like factories or warehouses, these devices integrate indoor localization algorithms that adapt to changing conditions, avoid interference, and ensure timely information delivery.
A key achievement was the development of temporary, self-deployable infrastructures, quickly installable by humans or robots in unmapped areas, enabling positioning even in unstructured environments.
The research also explored cutting-edge areas, such as relative localization systems (based solely on inter-device distances) and device-free localization, which detects human movement without requiring worn sensors.
A low-power UWB radar prototype was tested and validated, capable of tracking movement with high precision in a non-invasive way. This technology is designed for scenarios where privacy and simplicity of installation are crucial.
One study received the 10th VRT Mountain Innovators Grant, thanks to a simple yet powerful idea: using localization to monitor human-wildlife interaction in the forests around Trento—a real-world application where technology meets sustainability.
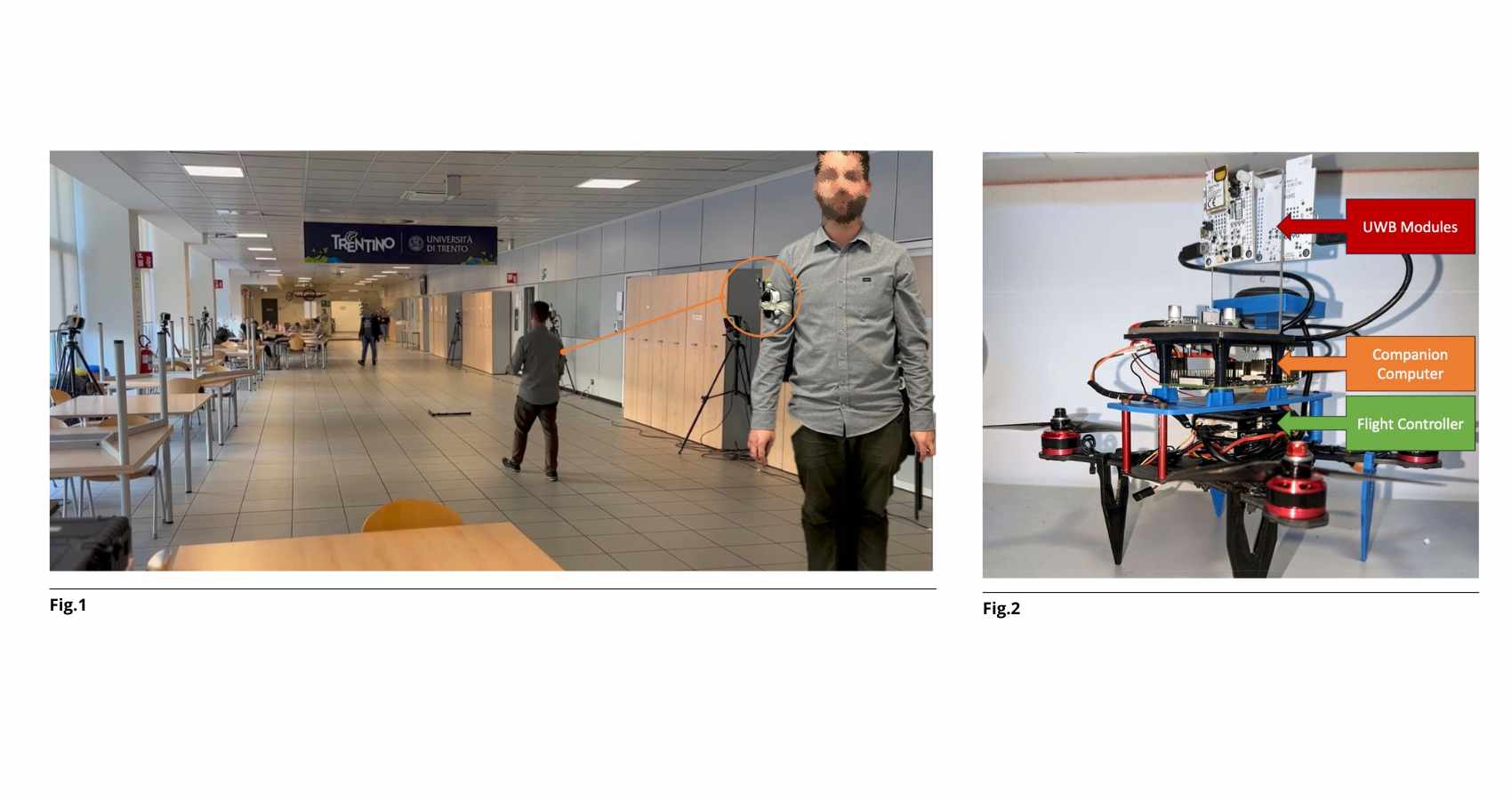
The research also expanded into autonomous mobile robotics. We developed systems that allow drones and robots to follow moving people with minimal onboard sensors—a critical choice for drones, where every gram and milliwatt matters.
Among the most fascinating topics tackled is the development of dynamic localization networks: systems where robots themselves deploy nodes along their paths, extending the positioning network in real-time. No fixed installations—only distributed intelligence in motion.
What if we had to explore Mars?
In preparation for autonomous planetary missions, we designed a cooperative localization system for UAVs, scalable and robust.
Each drone calculates its own position using DTDoA and locates others through relative positioning.
The result is a distributed, synergistic, and autonomous network where every node actively contributes to the ecosystem’s functionality.