Rivista di informazione del Dipartimento di Ingegneria Industriale
Università di Trento
Nella nostra vita quotidiana i robot sono compagni silenziosi, presenti nelle fabbriche, nelle nostre case e persino negli ospedali. Da robot industriali robusti e potenti a piccoli assistenti domestici, la tecnologia robotica è in continua evoluzione, adattandosi alle diverse esigenze umane. Quale sarà quindi la prossima rivoluzione? La cosiddetta soft robotics. Questo approccio della robotica promette di trasformare i robot rigidi in strumenti flessibili e adattabili, capaci di interagire in modo sicuro con l’ambiente circostante, ideali per operare in ambienti non strutturati e per interagire con oggetti e esseri viventi in modo delicato.
Nell’ambito della soft robotics, uno degli aspetti più critici e affascinanti riguarda lo sviluppo dei “muscoli” artificiali, ovvero attuatori che permettono ai robot flessibili di muoversi, adattarsi e interagire con il mondo circostante, proprio come i muscoli biologici. Ma perché questa è una sfida così complessa?
Muscoli artificiali: la chiave della robotica del futuro
Pensiamo ai muscoli umani: sono incredibilmente efficienti, capaci di generare contrazioni che possono raggiungere oltre il 20% della loro lunghezza a riposo e sviluppare potenze fino a 50W per chilogrammo di massa muscolare. Riprodurre queste prestazioni con materiali artificiali è tutt’altro che semplice, ma rappresenta una delle chiavi per portare la soft robotics a nuovi livelli di funzionalità e versatilità.
I motori convenzionali, basati su componenti rigidi come magneti, cuscinetti e carcasse metalliche, sono progettati per operare a elevati regimi di rotazione e sono ottimizzati per movimenti generalmente lenti e lineari. Tuttavia, quando si tratta di soft robotics, ciò che serve è una flessibilità e una capacità di adattarsi a movimenti e interazioni più complesse.
Ecco perché i materiali smart rappresentano una soluzione particolarmente promettente per lo sviluppo di muscoli artificiali robotici. Questi materiali hanno la capacità di rispondere a stimoli esterni, come corrente elettrica, variazioni di temperatura o radiazione luminosa, con una deformazione. Proprio come i nostri muscoli scheletrici rispondono agli impulsi elettrici inviati dal cervello per contrarsi.
Dal nylon ai polimeri elettro-attivi: la ricerca di Giacomo Moretti
La ricerca di Giacomo Moretti si focalizza sulla progettazione, modellazione e dimostrazione sperimentale di muscoli artificiali robotici utilizzando materiali smart polimerici. Nel corso degli anni, ha esplorato diversi principi e materiali per sviluppare muscoli robotici polimerici che consentano lo sviluppo di robot soft sempre più compatti, veloci e leggeri.
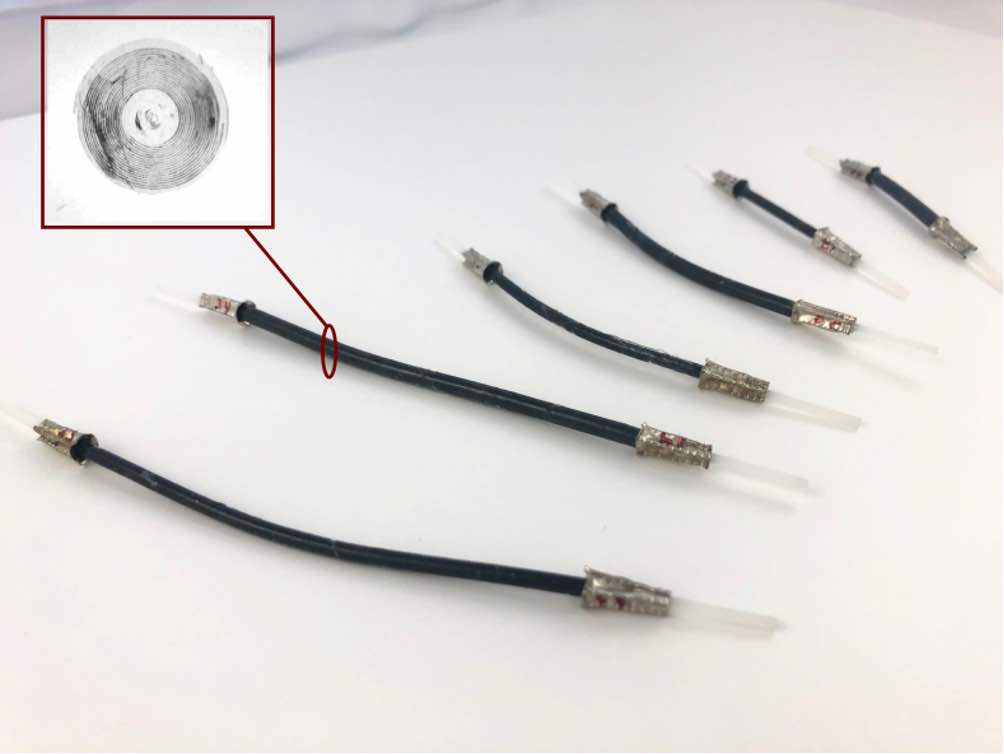
“Durante il mio dottorato alla Scuola Sant’Anna di Pisa, ho iniziato a lavorare con i polimeri termoattivi. L’idea – sviluppata originariamente da un gruppo all’Universitá di Dallas – è semplice: torcendo delle fibre polimeriche altamente trafilate (per esempio, dei comuni fili da pesca o da cucito di nylon), si ottengono delle strutture (delle sorte di molle) in grado di contrarsi se scaldate (Figura 1). La limitazione di questi muscoli, tuttavia, è la bassa velocitá raggiungibile, legata ai lunghi tempi necessari per scaldare/raffreddare le fibre.” Dice Moretti, “Successivamente, mi sono orientato verso i polimeri elettro-attivi (attivati da una corrente elettrica), o elastomeri dielettrici. Questi materiali possono allungarsi quando eccitati elettricamente. Ho approfondito questa ricerca durante un periodo in Germania, presso l’Università del Saarland, dove abbiamo sviluppato muscoli a elastomero dielettrico veloci e ripetibili basati su rotoli di membrane polimeriche (Figura 2), simili ai muscoli biologici nella loro struttura.”
Tuttavia, gli elastomeri dielettrici presentano limitazioni nelle contrazioni a causa della loro rigidezza intrinseca. Per superare questo ostacolo, nel 2020 il Professor Moretti ha collaborato con colleghi del Dipartimento (proffs. Fontana, Fambri e Diré) per sviluppare un nuovo tipo di muscolo che sfrutta un principio simile ma con forme e combinazioni di materiali completamente diversi. Questi muscoli hanno una struttura simile a un mantice (Figura 3), con pareti polimeriche e un fluido isolante interno. Applicando cariche elettriche sulle facce esterne del polimero, il fluido viene spinto fuori, permettendo al muscolo di contrarsi significativamente senza resistenze, raggiungendo contrazioni fino al 40% della sua lunghezza iniziale (qualche centimetro) e sollevando carichi notevoli (fino a diverse centinaia di grammi) con un peso minimo.
“In sintesi, attraverso la mia ricerca, ho esplorato e sviluppato diverse soluzioni per muscoli artificiali, dall’utilizzo di polimeri termoattivi agli elastomeri dielettrici e infine ai muscoli a struttura di mantice. Questi progressi rappresentano passi avanti significativi nel campo della soft robotics, avvicinandoci sempre di più alla creazione di robot flessibili e potenti con performance paragonabili a quelle dei muscoli biologici.”
Verso una nuova generazione di robot flessibili
L’innovativo approccio ai muscoli artificiali, che combina fluidi e polimeri, ha catturato l’attenzione della comunità scientifica. Questa nuova concezione è vista come una potenziale svolta nel campo della soft robotics, promettendo la realizzazione di robot flessibili con prestazioni precedentemente inimmaginabili.
Guidati da questo, il team si sta concentrando sulla progettazione di robot complessi basati sui muscoli artificiali ideati e sviluppati. Allo stesso tempo, stanno esplorando nuove opportunità di applicazione, con un’attenzione particolare al settore aerospaziale. Questo mercato è in continua ricerca di soluzioni di attuazione innovative, leggere e compatte, che riflettono esattamente le caratteristiche dei sistemi che il team sta sviluppando. Con questi sforzi, l’obiettivo è di contribuire all’avanzamento tecnologico e di ampliare le possibilità di applicazione nella robotica.