Rivista di informazione del Dipartimento di Ingegneria Industriale
Università di Trento

I sistemi GNSS (Global Navigation Satellite Systems) hanno trasformato il nostro rapporto con lo spazio: oggi possiamo localizzare con precisione oggetti, persone e veicoli, aprendo la strada a innovazioni nella logistica, nella robotica e nei servizi personalizzati, con una precisione mai vista prima.
Ma cosa succede quando i satelliti non ci vedono perché ostacolati da muri e strutture?
Negli ambienti indoor, dove muri e strutture ostacolano i segnali, entra in gioco un nuovo protagonista: la tecnologia UWB (Ultra Wide Band).
L’ obiettivo del nostro lavoro? Dare senso allo spazio, progettando:
Nel corso del progetto sono stati sviluppati dispositivi indossabili avanzati, dotati di moduli inerziali e magnetometri, capaci di stimare non solo la posizione, ma anche direzione e orientamento del soggetto. Progettati per ambienti complessi come fabbriche o magazzini, questi dispositivi integrano algoritmi di localizzazione indoor capaci di adattarsi a condizioni variabili, evitando interferenze e garantendo la tempestività delle informazioni.
Un elemento chiave è stato lo sviluppo di infrastrutture temporanee e auto-distribuite, installabili rapidamente da operatori umani o robot in ambienti non mappati, rendendo possibile il posizionamento anche in contesti non strutturati.
La ricerca ha esplorato anche ambiti di frontiera, come i sistemi di localizzazione relativa (basati solo sulla distanza tra dispositivi) e la localizzazione “device-free”, in grado di rilevare il movimento delle persone anche senza che indossino alcun sensore.
È stato testato e validato un prototipo radar a bassa potenza basato su tecnologia UWB, capace di tracciare i movimenti con precisione, in modo non invasivo. Una tecnologia pensata per scenari dove la privacy, la discrezione sono fondamentali e la semplicità di installazione fa la differenza..
Uno degli studi ha ricevuto il 10th VRT Mountain Innovators Grant, grazie a un’idea semplice e potente: usare la localizzazione per monitorare l’interazione tra persone e fauna selvatica nei boschi attorno a Trento. Un’applicazione concreta, dove tecnologia e sostenibilità si incontrano.
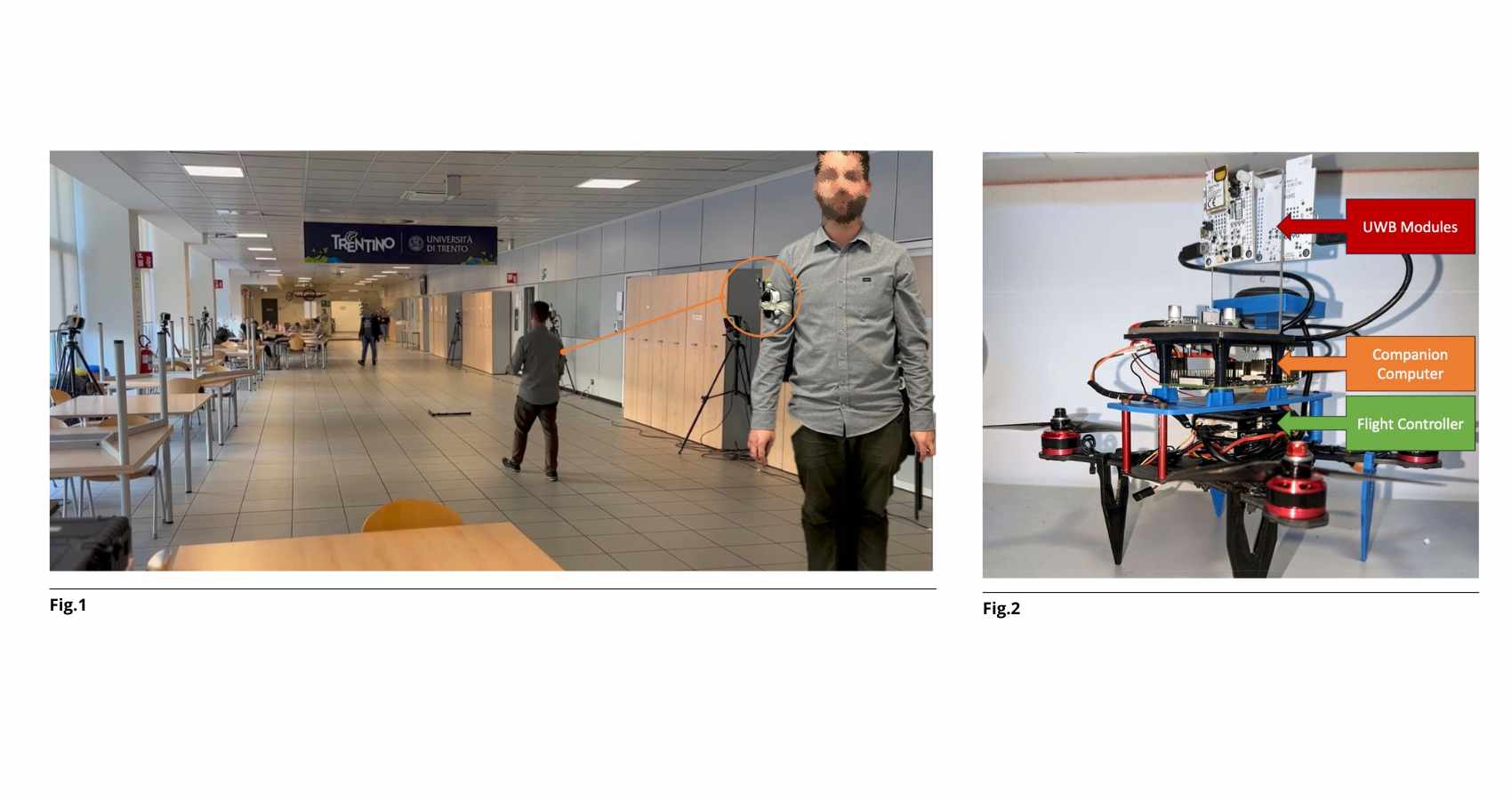
La ricerca si è poi estesa alla robotica mobile autonoma. Abbiamo sviluppato sistemi per far sì che droni e robot seguano persone in movimento, usando pochissimi sensori a bordo. Una scelta obbligata, specie per i droni, dove ogni grammo pesa e ogni milliwatt conta.
Tra i temi più affascinanti affrontati c’è lo sviluppo di reti di localizzazione dinamiche: sistemi in cui sono i robot stessi a distribuire nodi lungo il loro percorso, estendendo in tempo reale la rete di posizionamento. Niente installazioni fisse. Solo intelligenza distribuita in movimento.
E se dovessimo esplorare Marte?
In vista di missioni planetarie autonome, abbiamo sviluppato un sistema di localizzazione cooperativa tra UAV, scalabile e robusto. Ogni drone può calcolare la propria posizione usando la tecnica DTDoA e localizzare gli altri attraverso posizionamento relativo.Il risultato è una rete distribuita, sinergica e autonoma, dove ogni nodo contribuisce attivamente al funzionamento dell’intero ecosistema.